Lab 7: Kalman Filter
Testing in Jupyter
I chose my step size to be 160, a close upper bound of the PWM values produced in Lab 6.
I was sick and also very busy this week so I did not have time to do this lab properly, so I am using Anya’s results for the drag and momentum values with my Lab 6 results.
I plotted the KF estimated position (in orange) against my measured position from lab (in blue):
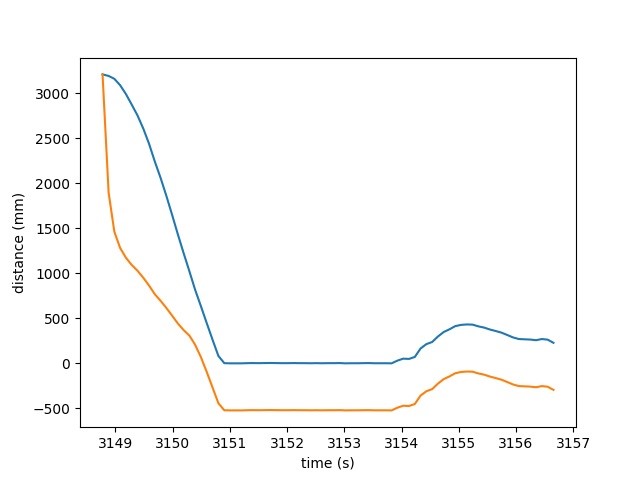
The filter consistently underestimates the measured data, but this is probably because I am not using the correct tuning parameters (drag and mass) for my particular car, as the shape of both curves are similar.
Extrapolation
I still did not have time to actually run this lab, but I planned to implement simple linear extrapolation:
void run_pid(unsigned long timeout, unsigned short goal, uint8_t deadband, float calibration, float k_p, float k_i, float k_d) {
PID params = { (float) goal, k_p, k_i, k_d };
unsigned long startMillis, currentMillis;
unsigned long previousMillis;
uint16_t previousDistance;
distanceSensor1.startRanging();
startMillis = millis();
do {
currentMillis = millis();
uint16_t distance;
if (distanceSensor1.checkForDataReady()) {
distance = distanceSensor1.getDistance();
distanceSensor1.clearInterrupt();
currentSpeed = (distance - previousDistance) / (currentMillis - previousMillis);
previousDistance = distance;
previousMillis = currentMillis;
tof1_time_buf[tof1_buf_len] = currentMillis;
tof1_data_buf[tof1_buf_len] = distance;
++tof1_buf_len;
} else {
distance = previousDistance + currentSpeed * (currentMillis - previousMillis);
tof2_time_buf[tof2_buf_len] = currentMillis;
tof2_data_buf[tof2_buf_len] = distance;
++tof2_buf_len;
}
// Compute PID
float raw = pid(currentMillis, distance, params, !tof1_buf_len);
uint8_t left = constrain(abs(raw), deadband, 255);
uint8_t right = constrain(abs(raw) * calibration, deadband, 255);
// Scale PID for motors
if (raw > 0) {
analogWrite(MOTOR1_FWD, left);
analogWrite(MOTOR2_FWD, right);
analogWrite(MOTOR1_BCK, 0);
analogWrite(MOTOR2_BCK, 0);
} else {
analogWrite(MOTOR1_FWD, 0);
analogWrite(MOTOR2_FWD, 0);
analogWrite(MOTOR1_BCK, left);
analogWrite(MOTOR2_BCK, right);
}
}
} while (currentMillis - startMillis < timeout);
analogWrite(MOTOR1_FWD, 0);
analogWrite(MOTOR2_FWD, 0);
analogWrite(MOTOR1_BCK, 0);
analogWrite(MOTOR2_BCK, 0);
distanceSensor1.stopRanging();
}